Voltamos com alguns detalhes do projeto.
Qual o problema? Como resolver? O que esperamos ao final? Cronograma de montagem? Esquema?
Essas e outras informações você encontrará detalhadas abaixo.
Integrantes?
Essas e outras informações você encontrará detalhadas abaixo.
Integrantes?
- André Miatto - RA 004201200252
- Bruno Siqueira - RA 004201201065
- Dario Hernandez - RA 004201401427
- Fabio Gargantini - RA 004201200145
- Henrique Roberto - RA 004201200107
Qual o problema?
Pendulo Invertido - O projeto que será apresentado sob a forma de um pêndulo invertido oferece, devido à sua natureza instável, um grande desafio para o projeto de um sistema de controle. Pode-se encontrar o mesmo modelo em diversos usos práticos e sofisticados atualmente como, por exemplo, sistemas de controle de lançamento de foguetes, controle de estabilidade de drones etc.
Controle PID - Este projeto pretende, com auxilo da plataforma Arduíno, projetar e implementar um modelo de pêndulo invertido, representado por um robô de duas rodas capaz de manter-se equilibrado através de um controle implementado com a técnica PID.
Pendulo Invertido - O projeto que será apresentado sob a forma de um pêndulo invertido oferece, devido à sua natureza instável, um grande desafio para o projeto de um sistema de controle. Pode-se encontrar o mesmo modelo em diversos usos práticos e sofisticados atualmente como, por exemplo, sistemas de controle de lançamento de foguetes, controle de estabilidade de drones etc.
Controle PID - Este projeto pretende, com auxilo da plataforma Arduíno, projetar e implementar um modelo de pêndulo invertido, representado por um robô de duas rodas capaz de manter-se equilibrado através de um controle implementado com a técnica PID.
O que esperamos ao final?
O objetivo deste projeto é adquirir conhecimento em diversas áreas das ciências exatas e tecnológicas, tais como: física, mecânica, eletrônica, afim de coletar informações suficientes para o projeto e para a implementação de um robô móvel do tipo pêndulo invertido, capaz de manter-se equilibrado sobre 2 rodas, utilizando como base eletrônica o Arduíno e um sensor do tipo acelerômetro.
Cronograma do projeto?
O objetivo deste projeto é adquirir conhecimento em diversas áreas das ciências exatas e tecnológicas, tais como: física, mecânica, eletrônica, afim de coletar informações suficientes para o projeto e para a implementação de um robô móvel do tipo pêndulo invertido, capaz de manter-se equilibrado sobre 2 rodas, utilizando como base eletrônica o Arduíno e um sensor do tipo acelerômetro.
Cronograma do projeto?
Se não dá pra explicar em palavras, usamos imagens:
- **Em breve**
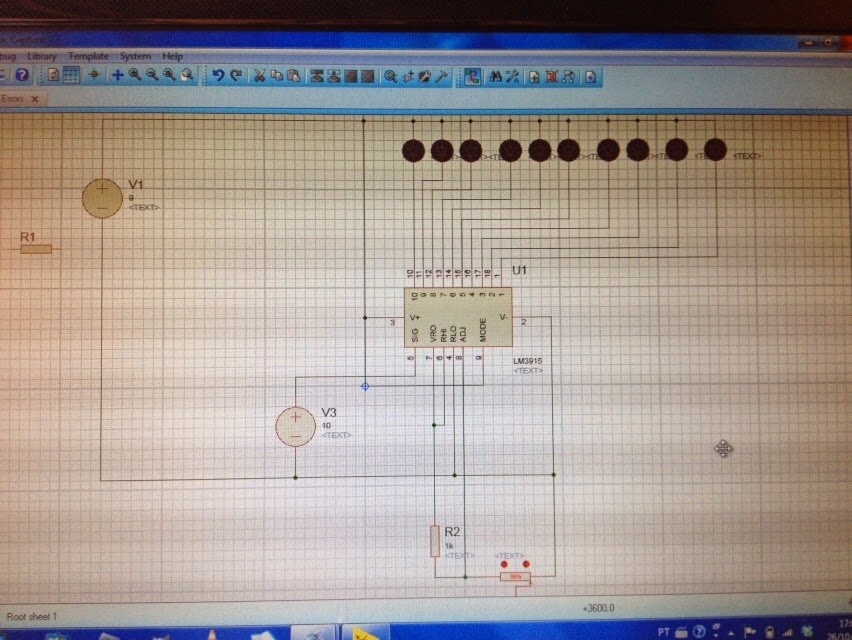
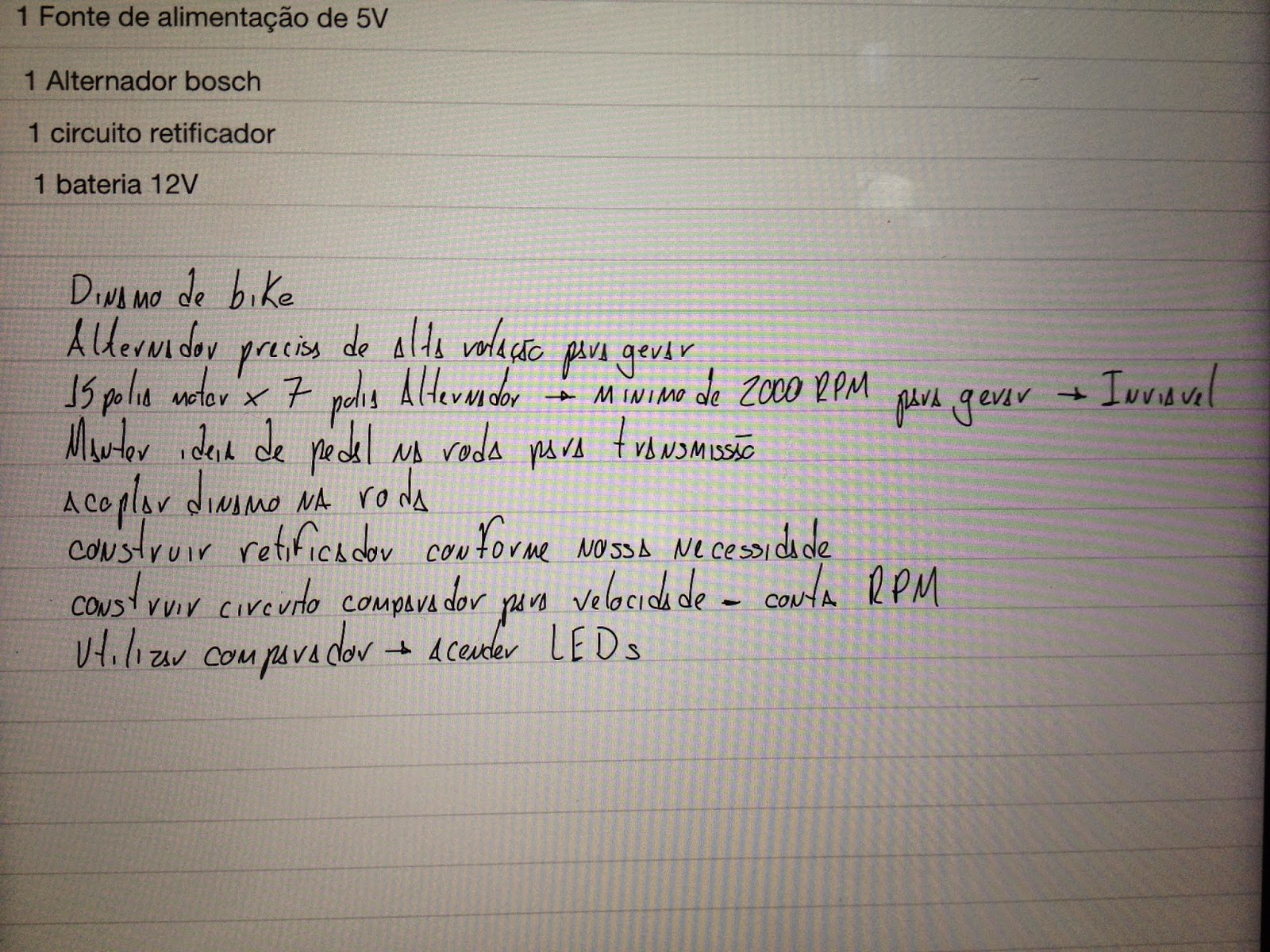
Esquema elétrico?
Se não dá pra explicar em palavras, usamos imagens²:
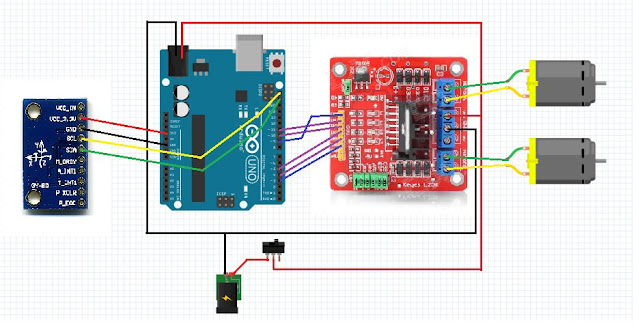
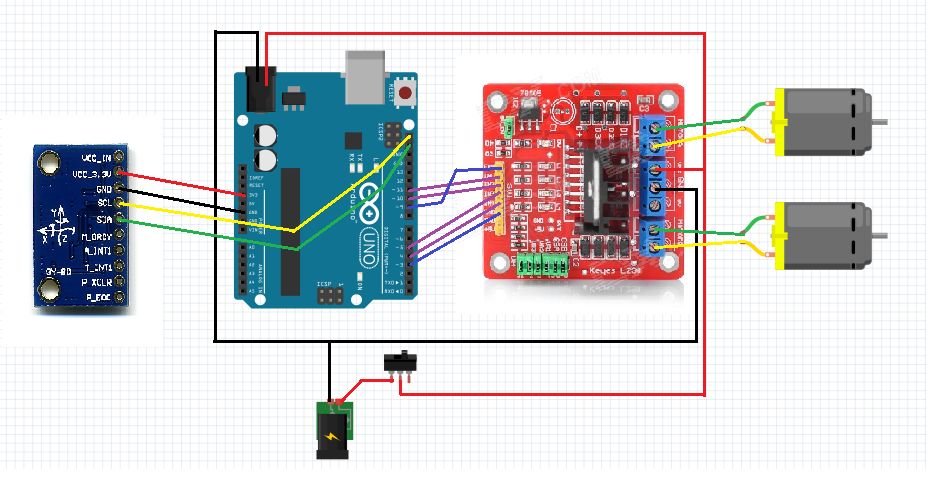
Componentes?
Para a implementação do projeto, utilizaremos:
- 1 - Arduíno UNO R3;
- 1 - Acelerômetro + Giroscópio - GY-80;
- 2 - Servo Motor SG90 - Tower Pro ("Hackeado" para motor CC com redução);
- 1 - Drive Ponte H - L298;
- 4 - Pilhas AAA 1,5V (Alimentação Arduíno);
- 1 - Bateria 9V (Alimentação Drive L298);
- 1 - Estrutura Papelão + Palitos Madeira;
Continuem acompanhando para mais informações!
Um abraço!
Um abraço!